全球产业链接平台
重庆市渝北区金星科技大厦A区5楼512室
联系电话:023-67139735(重庆)

商务合作

动脉网APP


一、需求描述
本技术已具备两台微创手术机器人样机。
1、融资需求:本轮天使轮融资1000万元,用于产品样机小试;
2、资源对接需求:地方政府,天使投资等。
二、项目概况
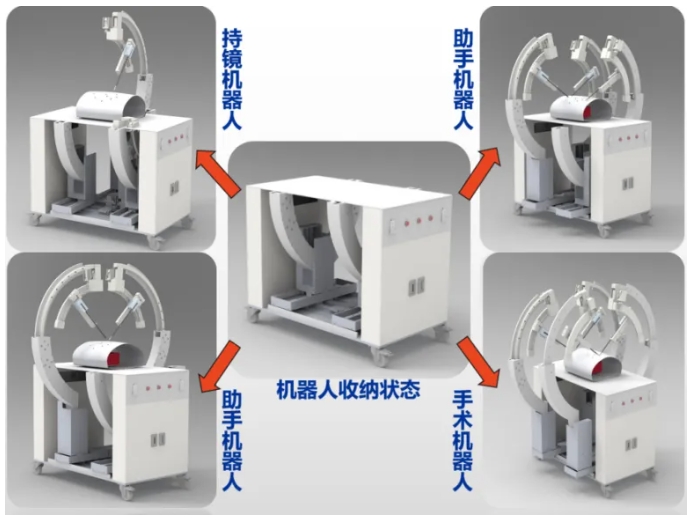
多场景人机协同的智能化胸腹腔微创手术机器人系统
1、痛点问题
目前,国内外胸腹腔微创手术机器人系统均采用单一的主-从操作模式,这种机器人工作模式使得医生与手术台完全分离,医生手部操作经验无法保留,不适于实际手术需求;另外,这种机器人工作模式还存在操作复杂、医生学习曲线长、机器人术前设置准备时间较长等技术短板,相比于单一的主-从操作模式,医生更需要具有多场景人机协同模式的手术机器人系统。
2、解决方案
本项目拟开发多场景人机协同的智能化胸腹腔微创手术机器人系统,允许医生选择与患者手术特征相匹配的机器人工作模式如医生-单机械臂,医生-双机械臂,医生-三机械臂等多场景人机协同模式,有效解决了目前市面上手术机器人无法考虑个体化手术特征仅能采用单一的主-从操作模式而造成的机器人设置时间过长、机器人操作复杂、手术时间无明显改善等问题。
3、竞争优势分析
目前国内外微创手术机器人(美国的Senhance,英国的Versius,以及国内的威高妙手、上海微创、康多)均以仿制美国daVinci机器人为主,机器人工作模式不满足实际手术需求。本项目在研制两代微创手术机器人样机的基础上,根据医生的机器人手术操作实验验证,医生普遍反馈兼具手术操作普适性和专科化的多场景人机协作的手术机器人更符合手术需求。项目前期通过技术攻关,已具备独立自主知识产权的机器人研发全链条所需的关键技术,可支持本项目的顺利实施。
4、市场应用前景
目前,国内外胸腹腔微创手术机器人系统均采用单一的主-从操作模式,这种机器人工作模式使得医生与手术台完全分离,医生手部操作经验无法保留,不适于实际手术需求;另外,这种机器人工作模式还存在操作复杂、医生学习曲线长、机器人术前设置准备时间较长等技术短板,相比于单一的主-从操作模式,医生更需要具有多场景人机协同模式的手术机器人系统。
所述胸腹腔微创手术机器人属于医疗器械产品,所处细分领域属于医疗机器人产业,服务目标客户和用户为医院。医疗机器人属于多学科交叉、知识密度较高、资金链条密集的高端技术产业,具有行业壁垒高、市场容量大、产品技术新等特点,发展潜力和市场前景十分广阔。根据美国相关统计机构分析结果,2023年医疗机器人市场规模将增长到167.4亿美元,复合年增长率为22.75%,而我国占据世界医疗机器人市场规模不足5%,具有巨大的市场空间。
5、知识产权情况
申请发明专利54项,其中已获授权发明专利28项,申请软件著作权9项。
三、团队介绍
吉林大学机械与航空航天工程学院医疗机器人课题组,多年来围绕机器人系统设计与智能控制开展了深入研究,已研发三代胸腹腔微创手术机器人系统并完成了虚拟手术系统搭建,研制了骨折复位手术机器人系统、系列化手术器械、康复器械、六维力/扭矩传感器、关节置换导航仪,并开展了机器人运动控制规划、主-从操作系统、自主手术以及多臂协作的研究。
课题组负责人,副教授,博士生导师,吉林省优秀青年人才,担任中国机械工程学会机器人分会委员、中国人工智能学会委员、中国医学装备协会管理分会委员及白山市康复辅助器械专家、国际仿生工程学会会员,入选“吉林省高端创新创业人才”,担任多家国际期刊审稿人。作为负责人主持国家自然科学基金、中央军委创新特区、吉林省重点研发等省部级项目20余项,在机器人领域知名期刊发表论文20余篇,申请国家专利共70余项,其中授权国家发明专利28项,完成专利转化8项。

吉林大学
教育部直属全国重点综合性大学,国家“211工程”“985工程”和首批“双一流”大学建设高校。
吉林大学
教育部直属全国重点综合性大学,国家“211工程”“985工程”和首批“双一流”大学建设高校。

全球产业链接平台
重庆市渝北区金星科技大厦A区5楼512室
联系电话:023-67139735(重庆)
商务合作
动脉网APP
友情链接