过去二十年,外科学完成了从开放式手术到微创手术的更迭,大约十年前,手术又开始从微创向智能化、数字化迈进,数字化外科的主要载体便是手术机器人。
机器人辅助手术与传统开放手术、微创手术相比,不仅灵活性高,还可以通过算法消除手部颤抖,具有精度高、创伤小、出血少、手术时间短、安全性高等诸多优势。
但由于价格、操作难度、临床实践兼容性、术式开展范围等方面的限制,手术机器人在院端的渗透率还有待提高。
Distalmotion则致力于降低手术机器人的购买、使用门槛,为更多患者提供更为优质的微创医疗服务。该公司成立于2012年,为一家瑞士的医疗器械公司。
以往,一台手术机器人一般仅用于一个科室,且能够开展的术式较为有限,极大地限制了手术机器人功能和价值的发挥。因此,使手术机器人的结构变得更加灵活、可移动、甚至可拆分成为手术机器人创新的一大重要方向。
Distalmotion敏锐地捕捉到手术机器人面临的这一困境,并对其核心产品——手术机器人Dexter进行了创新设计。其设计简洁、体积小、界面直观,使机器人技术更易于使用和普及。
Dexter手术机器人包括一个可保持无菌的外科医生控制台,两个可驱动一系列具有七个自由度和75度角度器械的病人推车,一个可承载任何 3D 内窥镜系统、并可从外科医生控制台进行完全控制的机器人内窥镜臂。Dexter整体设计结构紧凑、模块化,非常适合各种类型的医院,包括非住院中心和门诊手术环境。其简单的移动式设计使其能够在手术室中轻松移动和科室间共享。

Dexter手术机器人系统
Dexter采取分体式台车设计,可以自由组合、灵活移动,其小型模块化患者推车能够轻松安装在手术台周围,在空间较为狭小的手术室内尤其具有应用优势。内窥镜控制臂兼容所有 5-10 毫米内窥镜,包括最新的 3D 4K 成像系统,可安装在推车上或手术台上。
与一体式设计相比,其成本更低,术式也更广。分体式最大的优势在于,医生可以根据手术实际需求将不同台车摆放于床旁不同位置,极大地增加了手术的灵活性与自由度。并且,这种设计便于手术机器人厂家在产品售卖上采取灵活的搭配组合,让医院可以根据实际需求采购不同数量的分体式台车。
事实上,Distalmotion正是采用这种策略,提供各种量身定制、经济高效且灵活的采购方案,确保机器人手术更加经济实惠。除此之外,Dexter兼容所有手术室设备,包括成像系统和能量发生器,可无缝集成到医生术中工作流程中,医院无需额外采购相关器械设备,进一步降低了使用成本。
并且,作为一种临床通用系统,Dexter非常适合大手术量和复杂手术,适用于普外科、妇科和泌尿科手术,目前已通过CE认证,拥有30多种微创手术的临床经验。
Dexter手术机器人十分注重易用性和对现有临床实践的兼容性,这对于促进手术机器人向院端的渗透极为重要。
手术机器人虽然解决了微创手术中灵活性有限、手部颤抖、体力限制等问题,但也改变了医生所熟知的手术流程和操作习惯。现有的机器人多采用新的布孔方式和腕转器械,使得医生难以将过往经验进行无缝转移。
相关数据显示,中国虽然有超过12万名从事传统腹腔镜微创手术的医生,但实际经过培训合格并活跃使用达芬奇机器人的医生仅占全国腹腔镜医生总数的1%以下。
因此,如何让手术机器人的使用融入医生的临床实践和过往经验,缩短医生的学习曲线、降低上手门槛、提升操作体验是产品研发设计中必须考虑的问题。
Dexter采用简洁的设计、直观的界面和简单的控制方式,可以在几分钟内设置并准备好使用。此外,该手术机器人允许医生保持现有的临床工作流程、偏好的手术室设备以及熟悉的端口布置,从而减轻其培训负担并缩短学习曲线。
在手术精确性上,Dexter的模块化病人推车通过无菌控制台上的一个按钮,便可快速方便地切换不同的外科手术方法。这一设计使得医生能够本着“临床结果最佳化”的原则灵活调整手术策略,选择最合适的外科手术技术,无论是完全机器人手术还是部分机器人手术,Dexter都能提供支持。
为了实现从标准腹腔镜手术到机器人辅助手术的快速切换,外科医生需要穿着无菌手术服,在无菌控制台上工作,以便在手术过程中随时进出手术区域。这种快速切换与传统的全机器人平台形成对比。在传统的机器人设置中,外科医生需要重新洗手,机器人需要解除对接后才能转换。而Dexter机器人的每个手臂都可以根据指令折叠,且不影响它们的对接。
在不需要机器人平台时,可切换到标准腹腔镜手术模式,机器人手臂折回,会为外科医生提供更加充足的工作空间。由于从腹腔镜手术到机器人手术的切换可以在几秒钟内完成,外科医生可以随时选择在手术各步骤中是否使用Dexter。这种按需的机器人辅助手术方法在结肠切除术中优势更为明显。
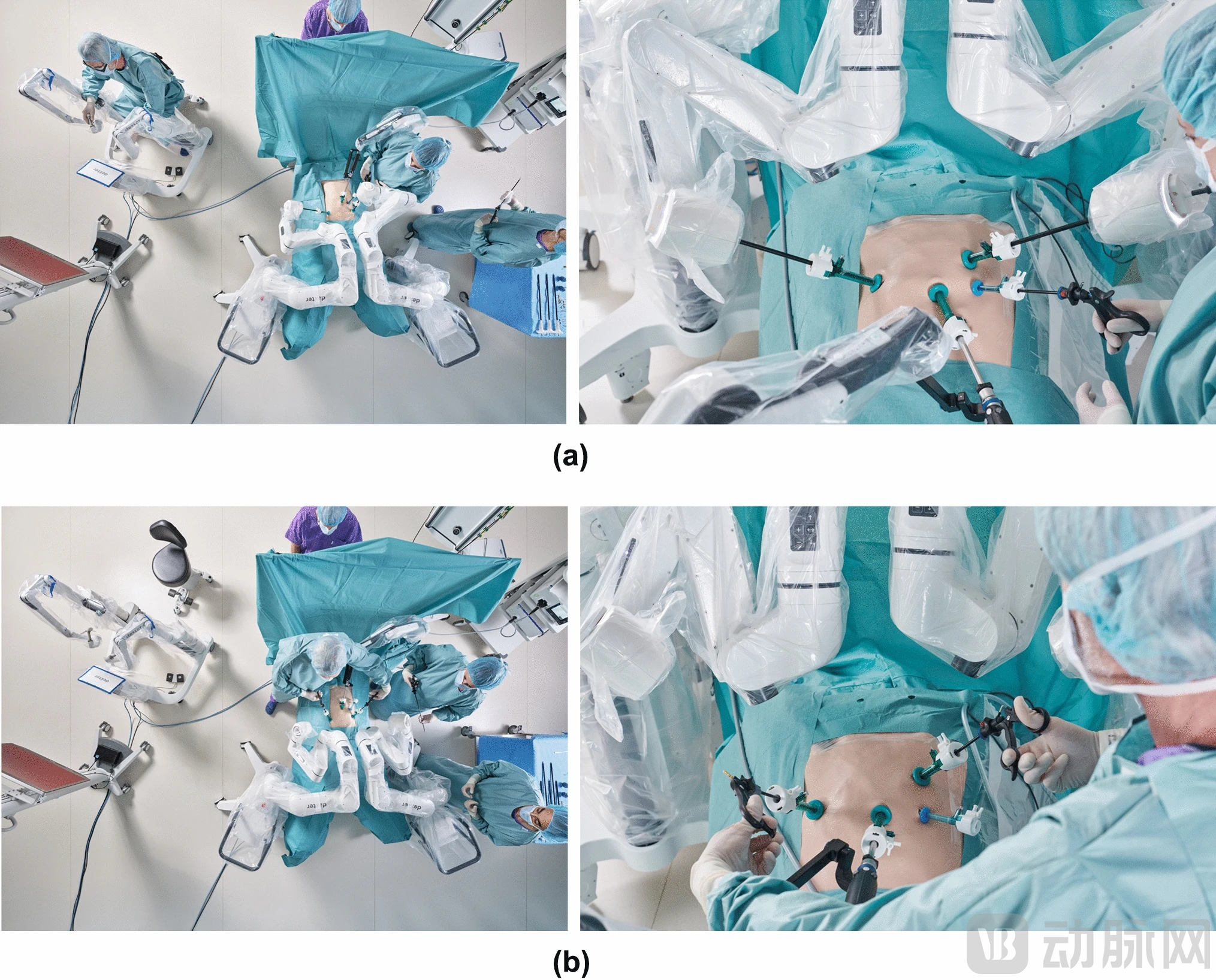
按需机器人操作过程中的模式切换:(a) 机器人模式下典型 Dexter 手术装置的俯视图和正视图。(b)腹腔镜模式下典型 Dexter 手术装置的俯视图和正视图。两个器械臂都折叠起来,以便为标准腹腔镜手术创造足够的空间
此外,Dexter的外科医生控制台经过优化,符合人体工程学原理,使用舒适度最佳,医生可根据喜好选择坐姿或站姿。在控制台上,医生可以通过手部位置离合器和手部旋转微离合器实现最大程度的关节活动度、精确性和控制力。Dexter自然的灵巧性和手部控制能力,使其即使在极端角度也能实现精确的旋转。
为了缩短医生的学习曲线,Distalmotion还提供培训课程。其培训学院由Dexter Academy 与专家教学中心和临床医生合作创建,使外科医生团队掌握必要的知识和技能,帮助手术团队提高操作Dexter 手术机器人的熟练程度并迅速有效地掌握使用Dexter的专业知识。Dexter Academy能根据外科医生的经验量身定制学习内容,缩短其学习曲线。
培训共分为四大板块,分别为基础知识培训、模拟器培训、外科医生实操培训、护士实践培训。
Dexter Academy基础知识培训主要包括电子学习模块,用户可以学习 Dexter 系统的相关知识,包括其组件、设置、功能和操作模式。该模块旨在让外科医生和手术团队掌握全面的系统知识,为实践培训课程做好更充分的准备。
在模拟器培训期间,外科医生会与 Dexter 一起沉浸在模拟的手术环境中锻炼基本的操纵技能,提高对Dexter的熟悉程度,使外科医生具备手部灵活性和对于Dexter手术机器人更加深入的认知能力。
在外科医生实操培训课程中,外科医生会在Dexter Academy的专家培训师的指导下,在模拟手术过程中通过各种场景和案例进行操作练习。
在护士实际操作培训课程中,护士将获得在医院环境中正确使用 Dexter 系统所需的必要知识,包括了解如何在手术期间安装和调整 Dexter 系统,以确保其在患者周围的位置合适;如何使用控制台、控制机械臂、调整摄像头等;如何正确覆盖患者,以确保手术区域清洁、无菌;以及如何使用手术器械,如剪刀、镊子、吻合器等,以协助外科医生完成手术。
除培训课程之外,在每一个病例中,Distalmotion都有专门的临床专家为整个手术团队提供实践支持。
Damien Thillou等学者曾在一篇文献研究中报告了世界上首个由Dexter机器人系统辅助的十例根治性前列腺切除术(RARP)的病例系列。该研究在在法国圣埃斯医院(Saintes Hospital, Saintes, France)进行了十例RARP ± 淋巴结清扫手术。手术团队迅速掌握了系统的定位和对接,所有手术程序都成功完成,没有发生手术中的严重并发症、转为开放手术或重大技术故障。中位手术时间为230分钟(四分位距[IQR] 226-235),中位住院时间为3天(IQR 3-4)。这一病例系列展示了使用Dexter系统进行RARP的安全性和可行性,并首次揭示了按需机器人平台能为愿意启动或扩展机器人手术项目的医院提供哪些帮助。
2024年3月1日,Alkatout I等学者发表了名为《使用 Dexter 机器人系统首次进行比基尼线以下的机器人辅助子宫切除术》的文献。在该研究中,一名患有子宫腺肌症和复发性子宫脱垂的 43 岁女性在石勒苏益格-荷尔斯泰因大学妇产科诊所使用 Dexter 机器人系统在比基尼线以下进行了机器人辅助子宫次全切除术和宫颈骶固定术。
结果显示,该手术无术中并发症,估计失血量为10毫升,操作时间为150分钟,控制台时间为120分钟,总对接时间为6分钟。Dexter的表现符合预期,没有发生与设备相关的问题或机械臂碰撞。患者不需要服用止痛药,并在术后第二天出院,证明使用 Dexter 机器人系统在比基尼线以下进行 RAH 是一种可行、安全的手术。
2023年4月20日,公司完成了由Revival Healthcare Capital领投的新一轮融资,融资总额高达1.369 亿欧元(约合人民币10.76亿元)。据Crunchbase官网披露,经历了7轮融资,目前Distalmotion融资总额达2.404 亿美元(约合人民币17.4亿元)
Dexter在欧洲的日常临床应用中,成功地治疗了普外科、妇科、泌尿外科等领域的大量复杂和大容量手术。这笔资金将用于获得FDA批准,继续加速欧洲的临床经验,并加快将Dexter应用到全球医院的步伐。