近年来,得益于人工智能的发展和医疗大数据的整合,各种类型的手术机器人出现大大改变了我们对待手术的方法。随着手术机器人技术在临床应用中的发展,临床外科也迎来了新时代。
从2000年由直觉外科(Intuitive Surgical)开发第一台手术机器人——达芬奇手术机器人并得到FDA批准以来,手术机器人已经发展到了第四代,提高了手术的精确性和操作性,并减少术中出血和术后感染的发生。
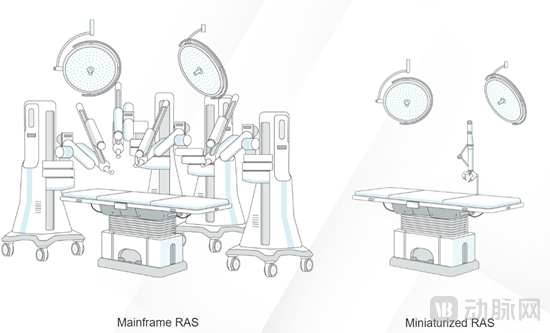
但到目前为止,几乎所有的手术机器人都体积庞大、操作繁杂、需要搭建特定的手术室予以支持。而这对许多医院来说,尤其是偏远地区、基层医院,都是不小的挑战。对手术机器人可及性、可达性的需求,催生了手术机器人向小型化、易操作的方向演进。
Virtual Incision创办于2006年,前身是内布拉斯加大学的一个合作项目。公司打造了一个世界上第一个小型机器人辅助(RAS)平台,提供小型且易操作的手术机器人系统MIRA。近两年来,Mira的发展也正式进入了快车道。
2020年,MIRA已获得FDA的IDE批准,进入临床试验的最后阶段。2021年11月,Virtual Incision获Endeavour Vision和Baird Capital共同投资4600万美元。8月,Virtual Incision宣布和NASA达成合作,预计在2024年将其产品小型机器人辅助手术平台MIRA送入到国际空间站(ISS),并在国际空间站(ISS)展开技术演练,以评估其执行切割模拟组织和操纵小物体等活动的能力。
Virtual Incision何以实现如此进展?又是如何博得NASA和资本的青睐?小型化是否真的是手术机器人的未来方向?
从“火星漫游者”任务到手术机器人
Virtual Incision联合创始人兼首席医疗官Dmitry Oleynikov,毕业于耶希瓦大学阿尔伯特·爱因斯坦医学院。他是一名活跃于临床的普通外科、食道外科和微创外科医生,拥有超20年的临床经验以及丰富的学术成就。目前,Dmitry担任RWJ蒙茅斯医疗中心的外科主任和RWJ罗格斯大学医学院的外科教授,同时是美国国立卫生研究院、国防部和美国国家航空航天局的众多联邦研究基金的首席研究员,研究总金额达到1200万美元。
Virtual Incision另一位联合创始人兼首席技术官Shane Farritor博士,毕业于麻省理工学院机械工程专业,目前在内布拉斯加大学林肯分校任教。在大学任教之前,Virtual曾在肯尼迪航空中心、戈达德飞行中心和喷气推进实验室(JPL)学习,拥有超过170项专利,发表了140余篇同行评审期刊。
对手术机器人的研究起始于一项Shane在内布拉斯加大学的关于“火星漫游者”任务的研究设计。在这项设计中,Shane和同事们共同搭建了漫游车,并参与了使用太阳传感器来监测漫游车行进方向的设计。
正是这项设计工作引起了美国陆军的注意,他们希望能够开发出几种不同类型的手术机器人,能够在病人体内驱动,从而降低军队野外作战时对战地医院手术的依赖。NASA也希望,能够研发出便携的手术机器人以供给宇宙空间中使用,为未来可能展开的长期太空工程做准备。
就这样,Shane就从NASA和美国陆军处获得了大量资金,开始了对手术机器人的研发工作。
MIRA:全球首台小型手术机器人,重量仅900克
从2000年开始,Shane和研究团队做了四十多次的尝试,不断对平台进行各种临床测试,终于开发出世界上第一个小型机器人辅助手术平台MIRA。
MIRA平台开发出来后,2006年Shane和Dmitry 就联合创办了Virtual Incision,2012年John Murphy加入公司并担任首席执行官。John Murphy毕业于伦敦格林威治大学、芝加哥大学和亚利桑那州立大学,获得计算机科学硕士学位和MBA学位,拥有超过30年在大中型公司的管理经验。
MIRA 平台旨在实现多象限腹部手术,目前专注于微创结直肠和下消化道手术,这是美国目前患者增长最快的手术领域,每年手术次数超过40万台。
在中国,结肠癌也是三大常见癌症之一。但现有微创手术机器人配置明显不足,大部分医院的资金又不足以购买更多的平台。“Mira平台旨在增加这些患者获得微创手术的机会,并大大减少必须等待手术的时间,让外科医生有可能在几天内进行手术。”John Murphy说。
未来,MIRA还将被开发用于疝气修复、胆囊切除、子宫切除术、袖状胃切除术等。
此外,MIRA还减少了MIS结肠切除术所需的切口数量。传统的手术需要在腹部切开4-6个八英寸左右的切口,而MIRA可以通过腹部的单个脐带中线切口插入,将切口减少为两个。这样可以将术后住院时间从十天缩短为四天,减少相关费用。
提高可用性、提高机器人使用效率、降低人员配置要求
WHO公布的全球外科手术量显示,全球手术量达到每年约2.34亿,相当于每25人就有一人接受手术。根据弗若斯特沙利文的数据,全球手术机器人市场规模由2016年的35.81亿美元增至2020年的83.21亿美元,复合年增长率为22.6%,预计未来将以26.2%的年复合增速增长至2026年的336亿美元。
手术机器人能够帮助医生实现三大功能:创伤小、精度高、感染少。但目前所应用的手术机器人都存在机器庞大、效率较低以及耗费人力较多的问题。因此,小型机器人辅助平台的研发成为必要。
·提高可用性
大型机器的尺寸使得在像门诊手术中心这样的小房间内移动或设置变得困难,一般只有大型的医疗中心能够配备。在我国,全球领先的达芬奇手术机器人大都在三甲中心医院才配备。MIRA的重量仅有两磅(907克),能够轻松地将RAS从一个地点转移到另一个地点,移动性强,提高了可用度。
·提高机器人使用效率
对于大型机器而言,每一台手术都需要重新搭建手术场景,较长的设置和周转时间限制了一天内可以执行的操作数。据估计,MIRA的安装时间能够控制在七分钟以内,能够最大限度的减少RAS的停机时间来释放手术室空间,减少周转时间以治疗更多患者。
·降低人员配置需求
大型机器的使用需要进行专门的培训,其对人员的专业素质有较高的要求,因此工作人员的可用性也有可能会限制其能够进行的手术量。
MIRA由微型臂、配套推车和控制台三部分组成。它具有一次性末端执行器、双极抓手和单极剪刀,同时搭载一个带有摄像头的可视化系统。摄像头具有仪器自动跟踪功能,以保证手术顺利进行。MIRA的设计能够360度旋转,通过系统连接的外科医生控制台的手部控制和脚踏板进行控制。在手术过程中,控制器会过滤掉手部震颤和意外移动。
MIRA微型臂微型臂由无悬挂的单个端口接入,包括一个穿过装置中心通道的铰接式集成摄像头和两个供给医生操作的仪表臂。它具有数百小时的使用寿命,通过其推荐的灭菌方案可实现重复使用。
配套推车是一种轮式手推车,包括系统支持设配、中转区和存储空间。它仅由两根电缆与其他仪器相连,一根连接摄像头,一根连接微型臂。
控制台包括一个大型手术监视器,显示来自摄像头、手动控制器、踏板和交互式触摸屏的实时视频反馈。主显示屏上以高清分辨率实时显示手术环境,具有自动跟踪功能的摄像头也可以进行手动控制。搭载一个显示触摸屏,提供3D维度的可视化视角。
临床医生可以通过手动输入设备操作机械的运动,配备监测用户动作的传感器,该传感器只有在监测到医生的动作与控制器正确吻合时才会开始工作。除了手动控制外,控制台还配备四个踏板,用于控制抓握、移动摄像头、左侧器械能量(双极电灼)和右侧器械能量(单极电灼)。

MIRA将登国际空间站进行技术演练
探索更广阔的太空空间、实现更长时间的太空旅行一直是人类美好的梦想,推动这个梦想的实现需要多重科技的支持与发展。为了这个梦想,NASA开始挑选合作对象。
MIRA的开创性灵感就来自于与NASA合作的“太空漫游车”项目。2000年开始,Shane和研究团队就不断获得来自NASA 的项目资金。自Virtual Incision成立以来,一共进行了11轮融资,总额达到1.16亿美元。
最近,NASA通过内布拉斯加大学的“刺激竞争研究计划”(EPSCoR)向Shane和研究团队颁发了赠款,他们希望通过这笔赠款推动MIRA于2024年登上太空空间站进行技术演练,以测试MIRA的广泛推广性。
MIRA最初的两次临床试验是在南美洲进行的,这为MIRA的后续发展奠定了方向。去年8月,MIRA第一次人体试验在内布拉斯加州林肯市的布莱恩医疗中心由Michael Jobst博士和Kelly Krier博士共同进行,通过一个肚脐的切口完成了右半结肠切除术。
“我所有的病例都能够用MIRA进行100%的解剖,”Jobst博士说,“我在五个不同的手术室中为八名患者做了手术,而这在大型RAS平台上是不可能做到的。MIRA有可能将微创手术的好处带给更多的患者,这确实令人兴奋。”
在NASA的资助下,MIRA将于2024年搭上国际空间站的顺风车,在空间站中进行技术演练。在空间站中,MIRA将只占据一个微波炉的空间,被存放在一个小型的试验储物柜中,其试验内容为切割模拟组织和模仿微创手术中的其他动作等。