自然界中的飞行昆虫,如果蝇,能够轻松完成急停、急速转向(Saccade)和空中翻滚等高难度动作,即便在突如其来的气流干扰下也能保持敏捷,这种超凡的飞行能力长期以来也成为机器人学家模仿的目标。
然而相比之下,同等尺度的微型机器人往往只能以较小的加速度跟随平滑轨迹飞行,难以复现昆虫的灵活性。
近日,在来自麻省理工学院(MIT)的Yi-Hsuan Hsiao等人发表在《科学进展》(Science Advances)上的一项研究中,研究人员开发了一种基于深度学习的鲁棒管模型预测控制器,成功让一个仅重750毫克的扑翼机器人实现了前所未有的特技飞行能力。

(来源:Science Advances)
该机器人不仅创下了每秒197厘米的飞行速度和11.7米/秒²的加速度纪录,还能在11秒内连续完成10次空中翻滚,并能抵抗高达160厘米/秒的强风干扰。
这项研究的发表标志着昆虫级机器人在飞行敏捷性方面取得了里程碑式的突破,也为未来微型机器人的自主化应用奠定了坚实基础。
昆虫级扑翼机器人通常指质量在1克以下、翼展在几厘米范围内的微型飞行器。这类机器人具有极高的扑翼频率(通常超过100赫兹)和极小的转动惯量(小于100 g·mm²),这使得它们对控制系统的要求极高。
一方面,快速的动力学特性意味着机器人极不稳定,要求控制器必须具备极高的反馈频率(往往需要千赫兹级别)才能维持姿态;另一方面,微小的体量使其极易受到环境干扰的影响,如周围的气流波动以及供电线缆产生的拉力。
此外,扑翼飞行涉及复杂的非定常空气动力学现象,如涡流的产生与脱落(Vortex Shedding),这使得精确建立机器人的动力学模型变得异常困难。制造和组装过程中的微小误差也会导致模型参数的巨大不确定性。
长期以来,受限于计算资源和模型的不确定性,现有的控制方法(如PID控制或线性控制)通常基于线性化模型设计,只能让机器人在低速(通常小于40厘米/秒)状态下执行简单的悬停或平滑轨迹跟踪。
一旦试图执行高加速度的特技动作,或者遇到强干扰,这些控制器往往会因为模型失配或响应滞后而导致机器人失稳坠落。如何设计一个既能处理复杂非线性动力学和不确定性,又能在计算受限的微型系统上高效运行的控制器,成为了该领域亟待解决的核心难题。
为了突破这一瓶颈,研究团队提出了一种创新的“双阶段”控制策略,巧妙地结合了模型预测控制(MPC)的鲁棒性和神经网络的高效性。
在第一阶段,研究人员设计了一个“专家级”的鲁棒管模型预测控制器(Robust Tube Model Predictive Control, RTMPC)。与传统的MPC不同,RTMPC不仅考虑了机器人的非线性动力学约束,还引入了“管”(Tube)的概念——即在标称轨迹周围构建一个干扰不变集(Disturbance Invariant Set)。只要机器人的状态保持在这个“安全管”内,控制器就能保证其在存在干扰和模型误差的情况下依然能够安全地跟踪目标轨迹。然而,RTMPC需要在线求解复杂的优化问题,计算量巨大,难以在微型机器人有限的计算资源上实时运行。
因此,在第二阶段,研究团队利用模仿学习(Imitation Learning)技术,训练了一个轻量级的神经网络(Neural Network)作为“学生”控制器来模仿RTMPC的行为。
为了解决训练数据获取昂贵的问题,研究人员引入了基于参数灵敏度的“采样增强”(Sampling Augmentation)方法。他们利用RTMPC生成的安全管,通过计算最优控制输入对状态的灵敏度矩阵,在不重复求解优化问题的情况下,快速生成大量管内的状态-动作对(State-Action Pairs)。这种方法极大地提高了数据生成的效率。最终得到的神经网络控制器仅包含两个全连接层,能够在普通桌面CPU上以极高的频率(1000赫兹)运行,完美复现了专家控制器的性能。
在一系列高难度的飞行实验中,该控制器展现了惊人的性能。
在执行类似昆虫的“机体急速转向”(Body Saccade)动作时,机器人需要先向一侧加速,然后急停并转向。实验数据显示,机器人的最大飞行速度达到了197厘米/秒,相比此前同类机器人的最佳结果提升了447%;最大侧向加速度达到11.7米/秒²,提升了255%。
更令人惊叹的是,该机器人在11秒的飞行中连续完成了10次空中翻滚(Somersaults)。这是一个极具挑战性的动作,因为翻滚过程中机器人处于欠驱动状态,且极易与供电线缆发生缠绕。
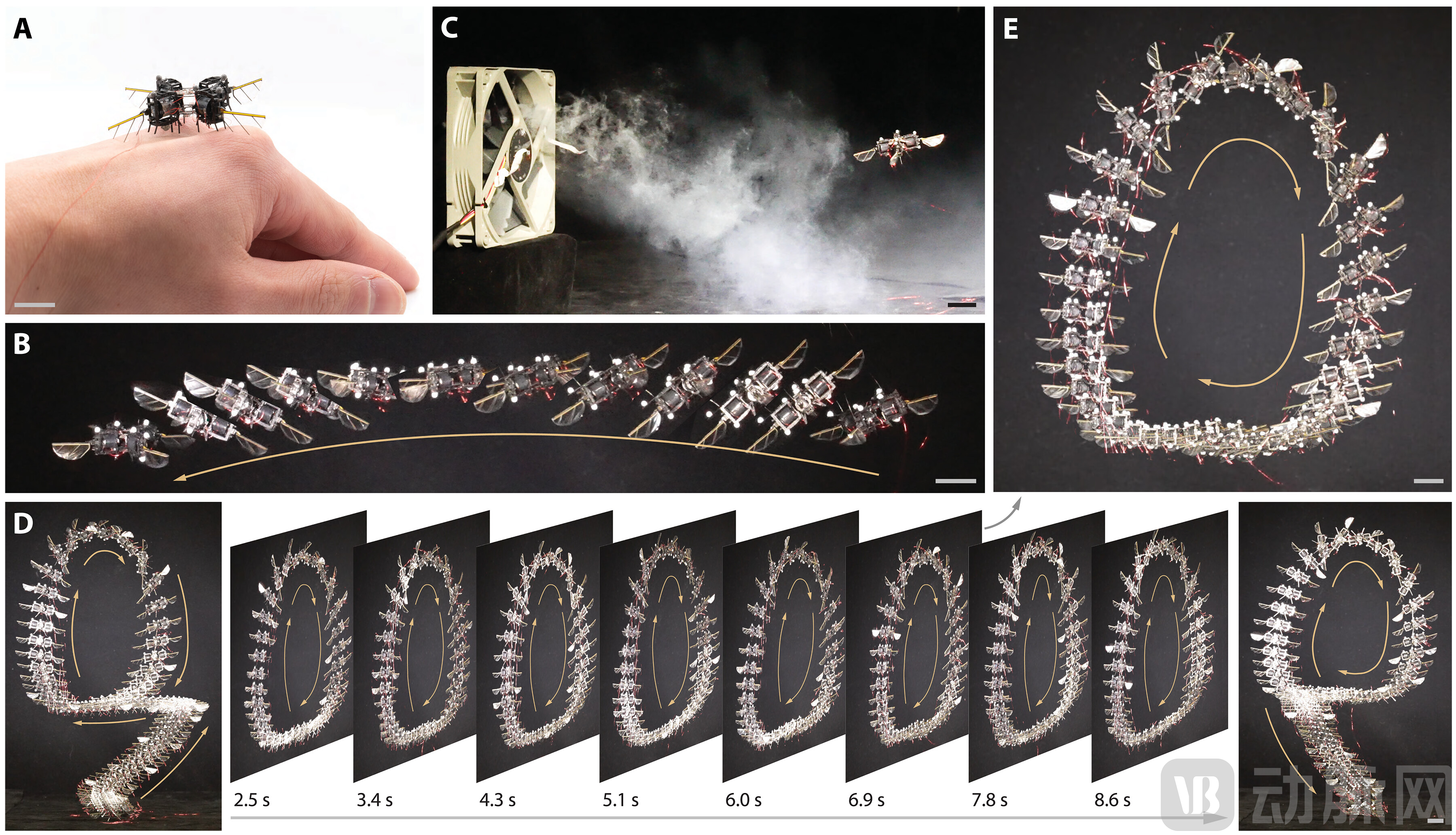
图:750 毫克扑翼飞行机器人执行的飞行机动轨迹(来源:Science Advances)
得益于控制器的鲁棒性,即使在电源线缠绕导致推力受到干扰的情况下,机器人依然将位置误差控制在2.5厘米以内。此外,在抗风实验中,即使面临160厘米/秒(相当于机器人自身最大飞行速度)的侧向风干扰,或存在33%的推力映射误差时,机器人依然能够稳定完成高难度机动,证明了该方法对模型不确定性和环境干扰的极强适应能力。
这项研究成果不仅在工程上实现了昆虫级机器人飞行性能的巨大飞跃,更在理论和应用层面具有深远意义。
首先,它有力地证明了软体致动器(Soft Actuators)结合先进控制算法,在微型尺度上完全可以媲美甚至超越传统刚性电机驱动系统的性能。该机器人的介电弹性体致动器(DEA)能够以330赫兹的频率驱动翅膀,并在几毫秒内产生巨大的推力变化,这是实现高敏捷飞行的硬件基础。
其次,该研究成功解决了控制复杂性与计算成本之间的矛盾,证明了通过深度学习将复杂的鲁棒控制策略“蒸馏”到轻量级神经网络中的可行性。研究人员发现,甚至只需一个包含8个神经元的极简神经网络,就能实现稳定的特技飞行。这意味着未来可以将这种高效的控制器部署到仅有几十毫克重的微控制器(如STM32芯片)上,为实现完全计算自主的微型机器人铺平了道路。
此外,该控制器的强鲁棒性使得机器人能够容忍制造差异,无需对每一台机器人进行繁琐的参数辨识,这对于未来大规模部署微型机器人集群具有重要意义。
展望未来,随着微型传感器(如微型IMU、光流传感器、飞行时间传感器等)技术的进步,结合这种高效的控制算法,我们将有望看到具备完全自主感知和决策能力的昆虫级机器人。它们将不再依赖外部的动作捕捉系统,而是像真正的昆虫一样,利用自身的传感器在狭窄、复杂甚至危险的环境中自由穿梭,执行搜救、环境监测、工业巡检等任务。这项研究展示了微型机器人技术的无限潜力,也让我们距离创造出真正的人造昆虫又近了一步。