微型机器人领域经过近40年的探索,一直面临着关键挑战:如何在亚毫米尺度上实现完整的信息处理能力。现有的微型机器人要么牺牲自主性,依赖外部设备控制运动;要么放弃可编程性,只能执行固定的任务。
但是自然界的微生物(如草履虫)却证明了在肉眼不可见的尺度上构建自主智能系统的可行性,这一事实数十年来一直吸引着机器人学家。
2025年12月11日,宾夕法尼亚大学Marc Z. Miskin团队在《Science Robotics》发表突破性研究,展示了一种尺寸仅210微米×340微米×50微米(约相当于草履虫大小)的微型机器人。
(来源:Science Robotics)
该机器人集成了感知、可编程计算、记忆、运动和通信等完整系统,能够,将具自主测量环境温度(精度0.3°C)并根据传感器反馈改变行为备完整自主功能的微型机器人体积缩小了10,000倍。
微型机器人的开发一直受制于尺度效应带来的根本性物理挑战。当机器人尺寸缩小到亚毫米级别时,多个关键系统的性能都会发生超线性衰减:半导体电路的漏电流急剧增加、能量存储密度大幅下降、无线能量传输效率显著降低、宏观尺度的推进机制完全失效。这些问题叠加在一起,使得传统的机器人小型化策略在亚毫米尺度难以为继。
具体而言,目前最小的具备完整感知、可编程计算和运动控制系统的机器人体积在1立方毫米以上,这一尺寸在20多年前就已达到,进一步缩小这些早期成功案例均遭遇了物理定律的阻碍。
为了绕过这些障碍,现有微型机器人通常采取折衷方案:通过外部硬件控制运动,牺牲可编程性、传感能力或自主性。即使少数微型机器人集成了板载电子系统实现单向通信和开环运动,它们仍然无法感知周围环境,也缺乏支持可编程决策的真正计算架构。
这种局限性使得微型机器人难以应对未知环境,在制造完成后的可重构性也极为有限。而理想的微型机器人应保留其宏观同类的所有核心特征:能够感知环境、计算决策、支持反复编程,并能操控或探索周围世界。
针对上述挑战,研究团队采用半导体制造技术大规模并行构建机器人的本体、执行器和信息系统,通过优化电路、执行器和制造工艺以匹配微尺度的物理约束,成功将问题逐一攻破。
整个机器人在商业代工厂采用55纳米互补金属氧化物半导体(CMOS)工艺制造,利用亚阈值数字逻辑在约100纳瓦的功率预算内运行,该工艺的高阈值电压将晶体管漏电流降低到足以支持亚毫米封装内的多种板载电路。
在这个微小的体积内,研究团队集成了光伏电池(供电)、温度传感器、四个执行器控制电路、光学接收器(用于下行通信和编程)、处理器和存储器等完整系统。这些子电路经过尺寸和功耗优化,处理器消耗了机器人93.2%的功率,但仅占26.0%的面积;相比之下,能量采集系统占据了53.8%的面积,以补偿处理器的能耗需求。
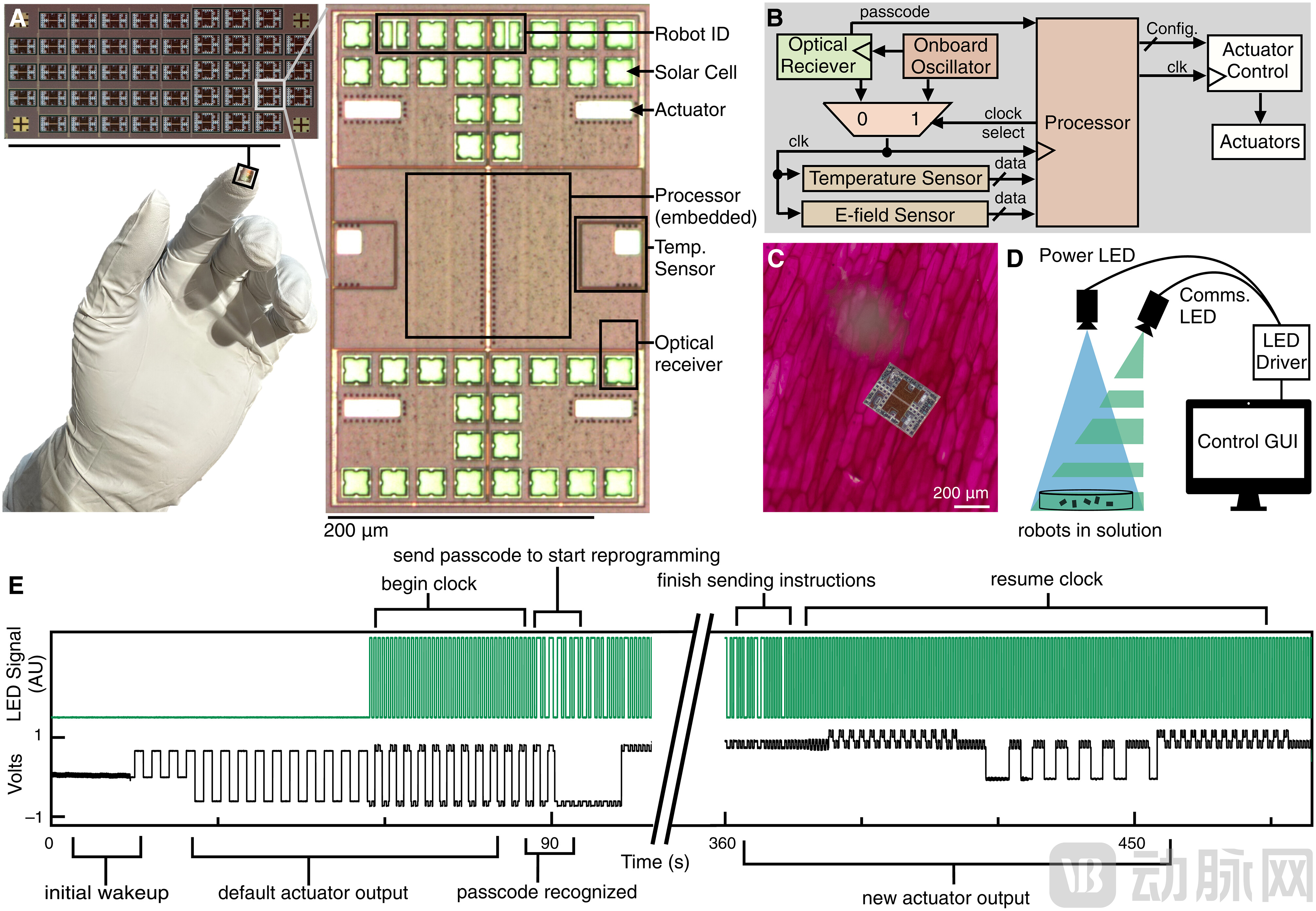
图:微型机器人电路概览(来源:Science Robotics)
为了在有限的存储容量下实现数字控制行为,研究团队设计了一套定制的复杂指令集计算机(CISC)架构,将有用的机器人动作压缩为专门化指令,如"感知环境"或"运动N个周期"。这种设计非常适合微型机器人,因为它在不牺牲功能的前提下减轻了处理器的存储需求。
具体而言,处理器包含32条11位指令存储器、4个8位寄存器和16条8位数据存储器,指令集涵盖传统的算术运算(加减法、位运算、移位)、控制流(无条件跳转和条件分支)以及机器人专用指令(运动控制mot、温度感知ts、通信wav)。通过采用功能完整的计算机,可编程存储器同时定义了指令序列和机器人的内部状态,使其能够在制造后进行数字化重新配置。
在编程方式上,机器人通过光学通信链路接收程序:一个LED用于为板载光伏电池供电,另一个LED通过闪烁传输数据。通信LED首先发送一个初始的照明闪烁序列(称为"通行码"),指示机器人将后续闪烁作为位接收并写入指令存储器。研究团队为每个机器人设计了两个通行码,一个全局通行码(所有机器人通用)和一个类型特定通行码(可寻址特定子集的机器人),以防止随机光波动改变机器人状态。编程过程已通过图形用户界面和定制电路板完全自动化,使任何人都能编程机器人,但一旦指令写入存储器,机器人的行为完全自主,无需进一步用户输入。
在运动方面,研究团队采用电动力学推进机制,这是少数满足板载电子器件低电流(<100纳安)和低电压(~0.1至1伏)要求的执行器之一。机器人浸入流体中,在极性相反的电极之间通过电流,机器人和附近表面周围的移动离子响应这个电场而移动,带动流体产生流动,从而使机器人以与施加电场成比例的速度移动。通过空间模式化的活动电极操纵电场,机器人可以朝不同方向移动或转向,功耗约为60纳瓦。
实验数据显示,四电极机器人有14种独特配置产生运动,分为四种行为:沿主轴或副轴平移、旋转和弧形运动。56次实验试验的统计数据表明,典型的平移速度为3至5微米/秒,转弯速度为0.1至0.3度/秒。通过串联弧形运动、转弯和平移,机器人可以在平面内追踪任意用户指定的路径,基站可以向机器人发送执行器命令序列,机器人在接收每条消息时更新其运动。
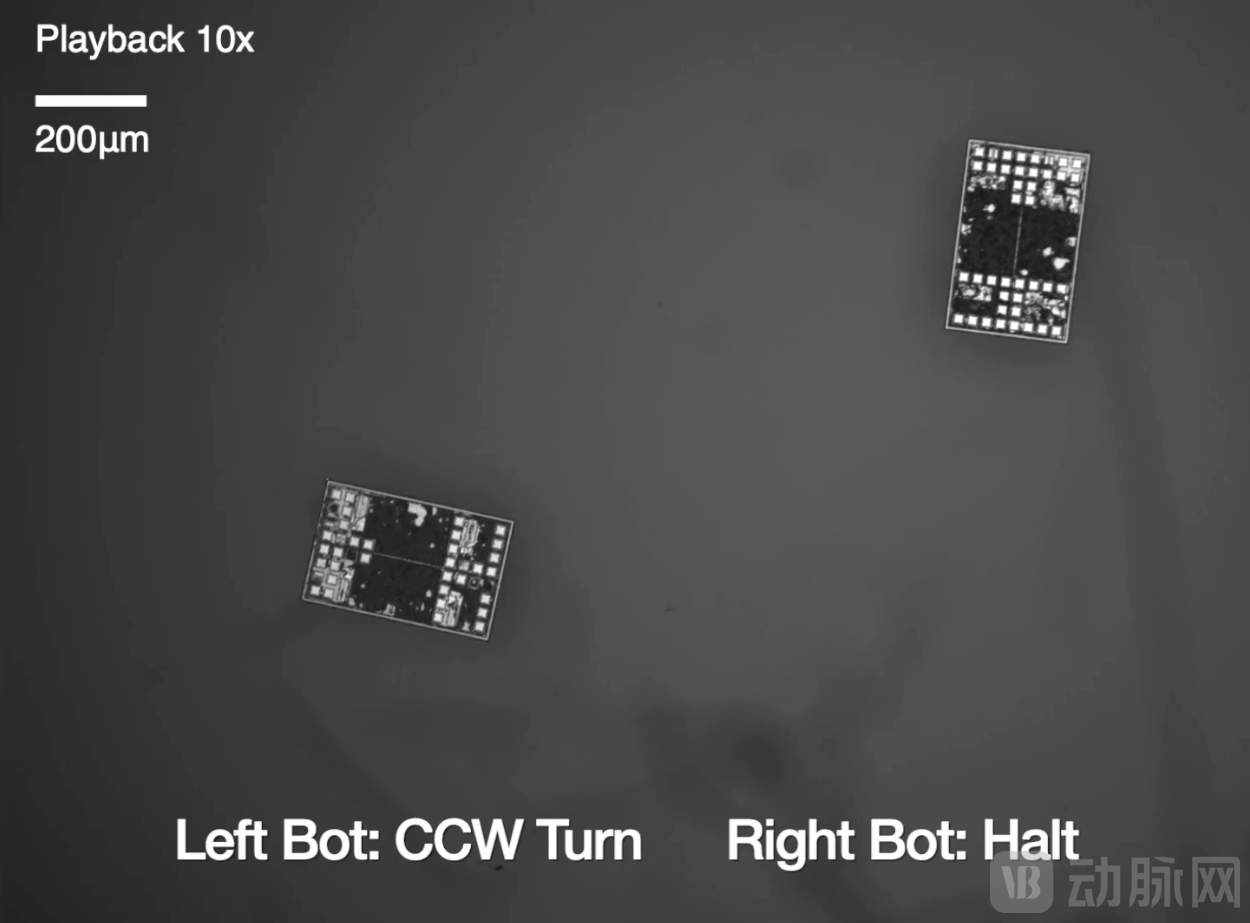
图:机器人的运动演示(来源:Science Robotics)
更重要的是,借助板载计算机,运动原语可以直接转化为智能行为:机器人程序可以根据传感器数据在运动模式之间自主转换。研究团队展示了两种不同的闭环行为,让机器人适应温度变化。
在时间模式任务中,机器人被编程为测量温度,将数值数字化,并通过以曼彻斯特编码序列切换前右执行器的极性将结果传回基站。由于定制指令集的存在,这个程序大部分仅用两条命令实现——"ts"处理感知,"wav"编码和传输数据。实验将机器人置于被动加热的冷却溶液浴中,将机器人报告的测量值与热电偶同步读数对比,发现两者一致,测量分辨率约0.3°C,偏差约0.2°C。
在空间模式任务中,研究团队编程机器人爬升温度梯度。使用热电热泵在溶液浴中引入温度梯度,机器人被编程为:如果当前温度读数低于先前读数,则执行弧形运动搜索更暖区域;如果温度读数更暖,则切换到转弯状态,原地旋转而不平移。实验结果显示,初始无梯度时机器人正确地原地转弯;当热泵开启冷却局部区域时,机器人切换到弧形状态并探索工作空间,直到找到更暖的区域后恢复旋转;当温度梯度方向反转时,机器人转回弧形运动,向相反方向移动。这种适应性行为完全由板载传感器和程序自主执行,无需外部干预。
这项研究的独特价值在于实现了完全可编程的自主性和局部传感器反馈,这为微型机器人带来了显著优势。
首先,许多现有微型机器人平台需要大型专用实验室设备(如磁线圈、超声换能器阵列或细胞培养环境),这种开销限制了使用范围,即使单个机器人成本很低。相比之下,该研究只需要可控光源用于供电和编程,因为信息处理在机器人上进行,从而使用普通部件就能实现高级功能。
其次,当前能够感知或控制行为的微型机器人只能执行固定的、设计特定的任务,而该研究的机器人集成了功能完整的数字计算机。这意味着数字编程和板载计算使单个通用微型机器人能够执行一系列任务,可以在制造后按需重新配置。
在传感性能方面,这种微型机器人也展现出卓越优势。与现有最先进的数字温度计相比,该机器人在体积小于1立方毫米的情况下提供0.3°C分辨率,帕累托优于该领域的其他方案——少数实现更高分辨率的传感器占据了至少一个数量级更大的体积。因此,这种传感器可以在更小的空间尺度或更受限的几何结构(如微流控腔室或毛细管)中探测热梯度。结合探索空间和高精度报告温度的能力,微型机器人可能适用于生命科学测量:机器人可以适应亚毫米空间,以亚1°C的精度记录,覆盖中温细胞生物学的整个温度范围,并随着细胞生长、死亡或重构而随时间重新定位。
更令人振奋的是制造成本优势。该研究的微型机器人在规模化生产时,每个机器人的成本约为0.01美元(1美分)。研究中使用的机器人从富士通作为多项目晶圆运行的一部分购买,价格约为10,000美元/平方毫米,产生约100个芯片,每个芯片包含约100个机器人,因此每个机器人成本约为10美元。但如果扩大到生产规模,,成本会大幅降低,使0.01美元成为商业产品的现实估计。
尽管这里展示的初步机器人需要进一步的进展(如新执行器或能量传输方案)才能实现长远目标,但其电路和计算机架构已经为未来发展奠定了坚实基础。例如,采用更先进的工艺节点,板载存储器可以增加约100倍(前提是阈值电压保持足够高以抑制漏电流),这将促进更复杂的程序(接近数千行代码)和更复杂的自主行为。在现有工作的基础上,程序已经可以通过集成通行码对单个机器人唯一化,即使没有直接的机器人间通信,这也允许中央控制器分配不同任务或模拟多智能体协调。通过驱动和测量溶液中的电流,电路可以促进空间定位或流体介导的通信。针对推进优化的子电路可以将机器人速度提高10倍,或者驱动适合苛刻环境(如体内操作)的其他电子集成执行器。
这项研究通过半导体制造技术实现了微型机器人的感知、思考和自主行动能力,将具备完整自主功能的机器人体积缩小了10,000倍。板载信息处理带来的多功能性、易用性和低成本组合,可能在从活体系统物理学研究到纳米制造、显微外科和药物递送等领域找到应用。
未来,更先进的电子集成微型机器人可以在靶向药物递送中发挥作用,根据局部传感器线索(如生化标志物或温度变化)释放药物而非全局命令;在遥测中,板载计算可以对数据进行数字编码,使通信对噪声更加鲁棒;在纳米制造中,可编程微型机器人可以使用基于通行码的通信在工作时接收、监控和更新指令。